The Pain Point
The old loop made the picture do too much work. A frame was generated, a vision pass described it, and the world state tried to infer what must have happened. If the image showed John near the truck, the state had to decide whether he had walked there, teleported there, or merely been painted there because the prompt got ahead of itself.
That made every pretty frame a little dangerous. A convincing image could smuggle future facts into the run: phone already readable, object already carried, store already reached, route already completed. The world looked coherent while the ledger quietly picked up debt.
This is not an exotic AI problem if you translate it into ordinary life. Imagine a guy named John trying to prove he got groceries. He sends you one photo from the parking lot, one photo from the kitchen counter, and one photo of the receipt. Those photos are useful, but they are not the whole errand. They do not prove when he left, which car he drove, whether he paid, whether the milk sat in the hot trunk, or why the receipt is somehow from a store across town.
The early harness was acting like the photos were the errand. If the picture looked like the next sensible scene, the system was tempted to accept the implied story. That is how a generated world becomes a scrapbook with confidence instead of a world with memory.

Why It Was Hard
Images are seductive evidence because they feel concrete. But they are not a database. They do not know whether John earned the transition. They do not enforce time. They do not remember which objects are portable, which door connects to which room, or whether a rejected frame should advance the clock.
The technical problem was authority. If vision output can mutate canonical state, then the system is always recovering from whatever the last frame implied. Rejections, focus inserts, audits, and renders all cost time and tokens before the world can say what actually happened.
Everyday software has the same trap. A screenshot of a bank app can show a balance, but the transaction ledger is what tells you how the balance got there. A photo of your garage can show a ladder leaning against the wall, but your actual memory tells you whether you already loaded it into the truck. The generated frame was acting like screenshot, receipt, diary, and inventory system at once.
Commit-backed fix: the newer engine moves canonical time, actor location, object state, phone state, vehicle state, occupancy, and event history into deterministic `SimWorld` ticks before rendering or audit.
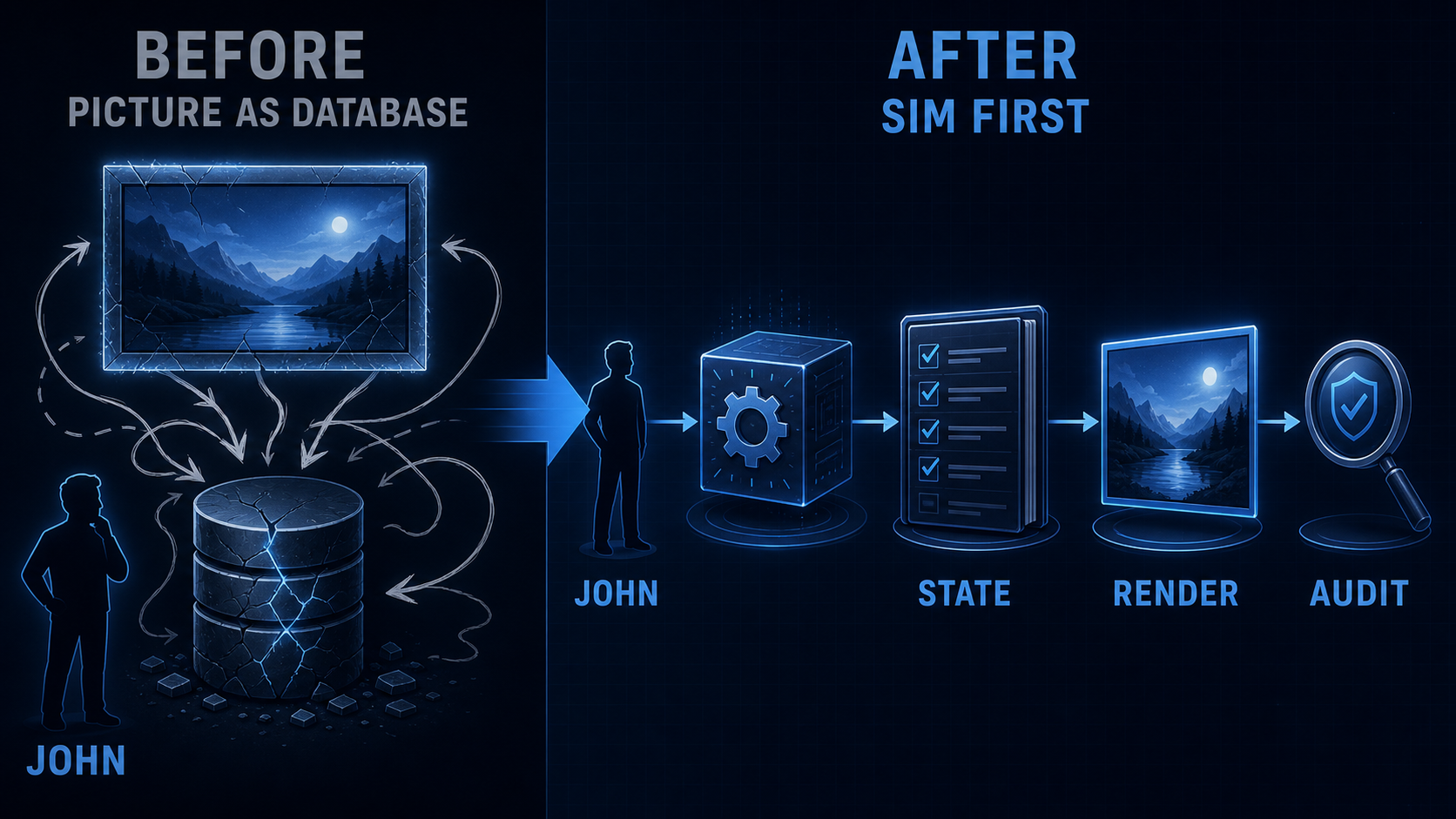
What Changed
The simulation-first engine turns the picture into an output of committed state instead of the source of committed state. The world advances through fixed ticks. Actor jobs, device state, vehicle transport, spatial occupancy, and append-only events are updated by deterministic code. A render snapshot is then built from those facts.
That sounds less magical because it is. The magic is now downstream. Image generation can visualize a committed snapshot. Vision and local-vision can audit it. But audit metadata is explicitly non-authoritative: it can complain, measure, or flag drift, but it cannot rewrite where John is.
The old visual loop still exists for compatibility, but it is no longer the default path. The default run can execute with no OpenAI calls at all, which is exactly the point: a world that cannot tick without a picture is not yet a world.
The practical analogy is a normal day planner. John does not become “at the store” because someone drew him at the store. He becomes at the store because the world clock advanced, a route job moved him through valid locations, and the event log recorded the trip. The picture is then allowed to illustrate that fact.
That flips the whole debugging posture. Instead of asking, “What did the image seem to say?” the harness can ask, “Did the render match the state we already know?” If it does not, the render is wrong. The world is not forced to absorb the mistake.
What This Unlocks
This repair makes the later problems easier to isolate. Navigation can be tested as graph movement. Phone tasks can be tested as state-machine order. Vehicles can be tested as carrier and route state. Rendered images become evidence for presentation and audit, not the court of final appeal.
The payoff is boring in the best way: deterministic replay, bounded cost, append-only event sequencing, and snapshots that describe what the world has already committed to. John can still look strange. The difference is that the strangeness no longer gets to silently edit the database.
For readers who do not care about simulation internals, this is the point: a generated world starts to become trustworthy when it can say no to its own pictures. The frame may be beautiful, but beauty is not provenance. The grocery bag, the phone, the truck, and John’s location all need their own accounting before the camera gets a vote.