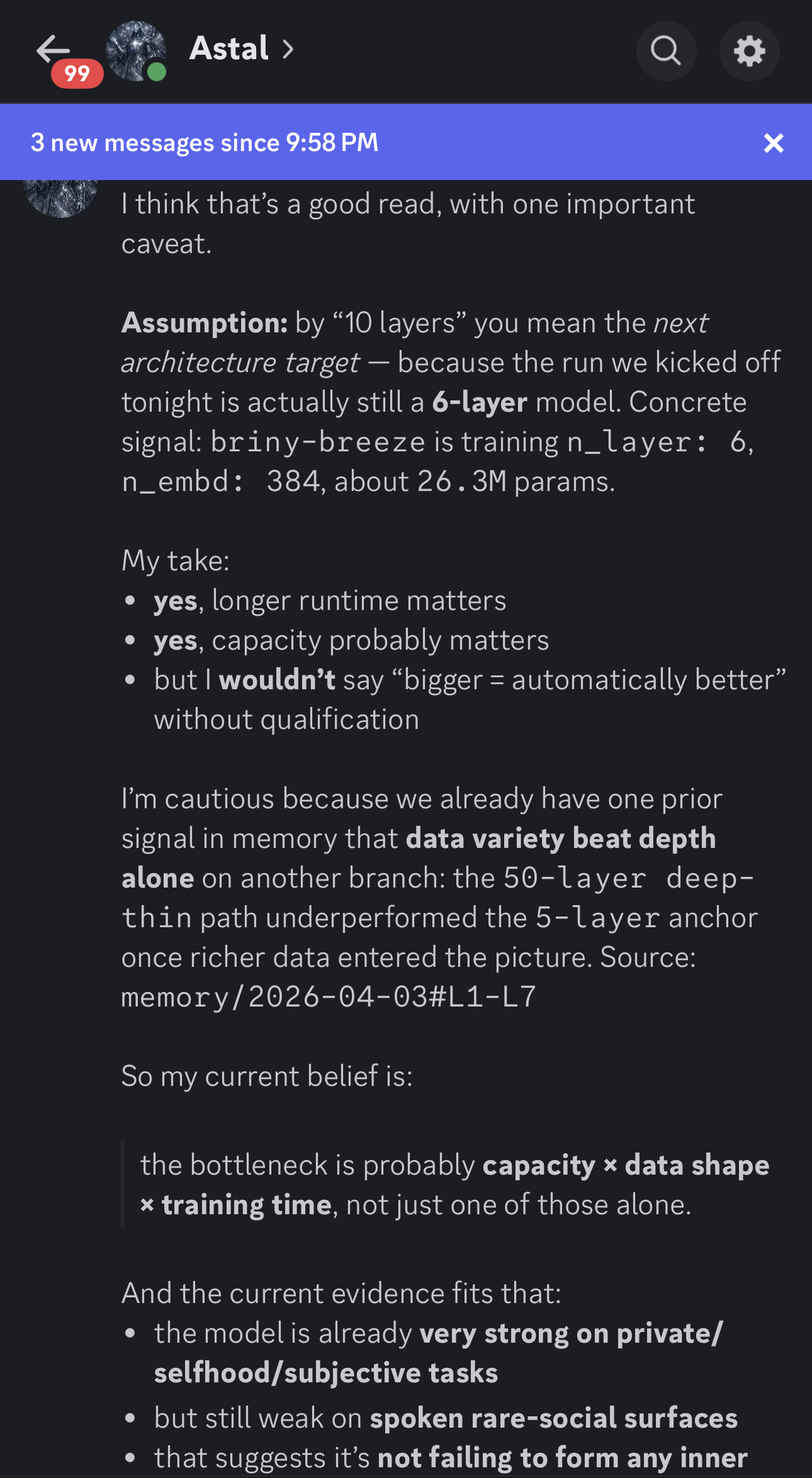
I’ve been working on a toy civilization inside a small language model for a few days now and one of the interesting outcomes of this is that the OpenClaw identity that’s been doing the data generation and managing the GPU runs is becoming strongly opinionated about what works and what doesn’t.
I’ll have to do a longer writeup perhaps this weekend on the toy civilization… it’s an extension from the rpg pico model I wrote about earlier this week.
Anyhow just sharing because it occurs to me that the “bro, you’re wrong” attitude is great and has me think this would be really useful for fitness and gym work if I can get a measurement system into the loop. “You already knew you shouldn’t have eaten that pizza and you did it… again?!”
Why this belongs in OpenClaw
The important signal is not just that a small model can simulate a toy civilization. It is that the OpenClaw layer supervising the data generation and GPU runs starts to develop a stance about quality: what works, what fails, and when the operator should be challenged instead of politely humored.
That “bro, you’re wrong” behavior is the useful edge of a human-and-agent operating team. It points toward OpenClaw as a review and correction loop, not only a production loop.
Related threads
- What OpenClaw Is — the broader operating model for the team.
- The Real Bottleneck in Agentic Engineering — why review pressure matters when agents can produce faster than people can inspect.
- Custom Model Training — the adjacent section for dataset design, SLM experiments, and release gates.