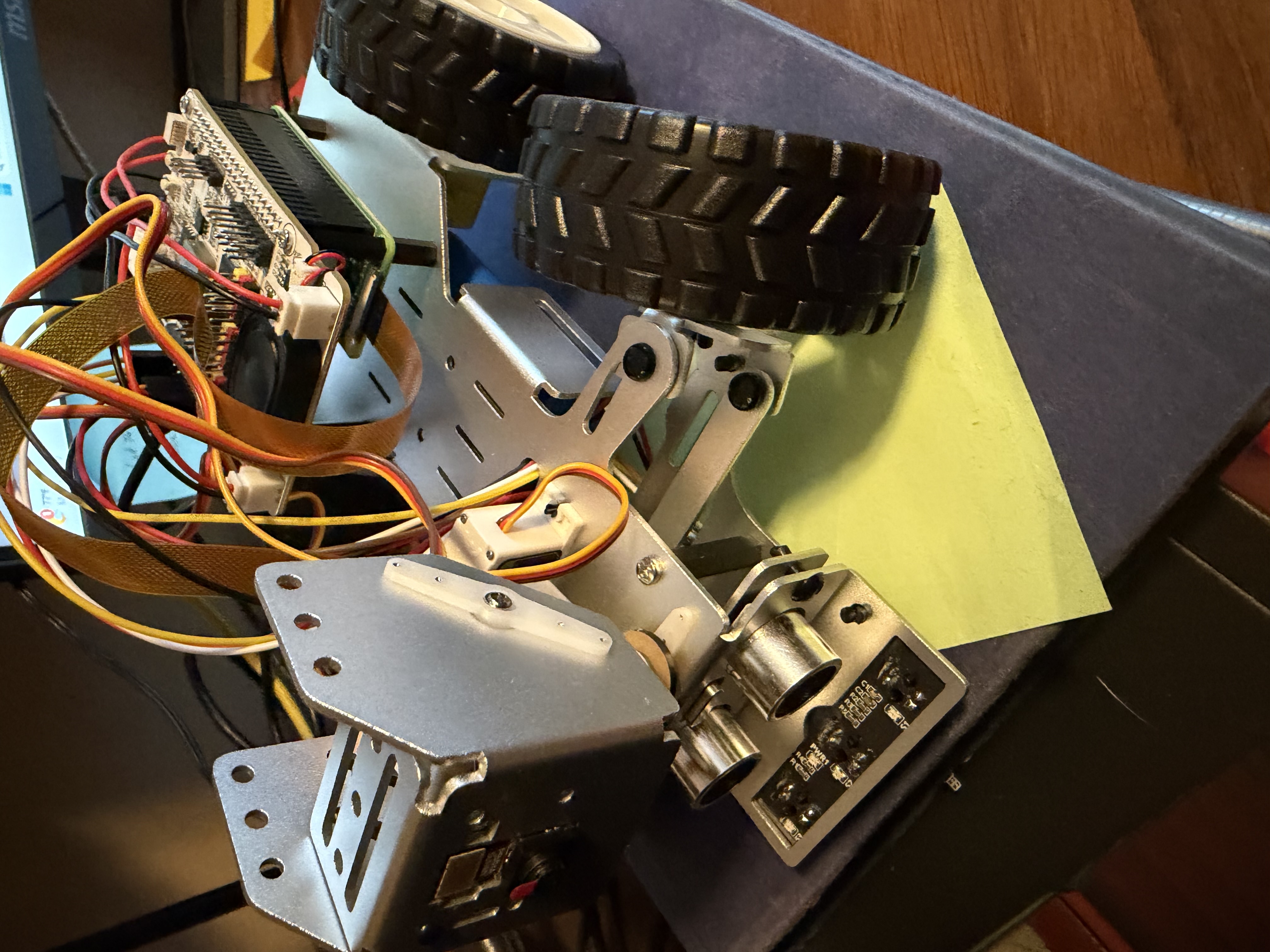
While waiting on codex limits to reset, back to building robots it is. This is a Picar-X that’s WIP. Nano pi for on-board and have this idea of the driver being the Jetson Orion, which will be “system2 big brain”. That’s the plan anyway!
Build context
This is one of the small frontier-work notes where the point is less a finished essay and more a visible handoff between software-agent work and physical-world experiments. When the coding-agent lane pauses, the bench opens back up.
Local body
The Picar-X is the physical shell: motors, sensors, and the practical constraints that make robotics different from a clean browser demo.
On-board layer
The NanoPi keeps the robot grounded close to the hardware, where latency, power, and sensor handling matter.
System 2 layer
The bigger Jetson-class driver is the planned “system2 big brain”: a heavier reasoning and control layer for the parts that need more model-side intelligence.
The useful thread is the architecture shape: cheap body, local controller, and a heavier reasoning tier that can be swapped, upgraded, or challenged as the experiment grows.